ABOUT ME
Hello! I’m Yekta, an experienced software engineer with an MASc degree, located in Toronto. I develop backend software solutions, leveraging my expertise in cloud computing and low-level coding. Here are some interesting facts about me:
- I am a proud alumnus of the University of Waterloo and METU.
- I have travelled more than 30+ countries.
- I have taken philosophy classes during my undergraduate.
- I am a bookworm, consistently reading a minimum of 10 non-fiction books each year.
I am a self-motivated individual with a strong commitment to continuous improvement and pushing the boundaries of my capabilities. I enjoy working both independently and in collaborative team settings. I invite you to review my portfolio of projects!
SKILLS

Understanding how to design systems using cloud technologies is crucial for ensuring that applications last, scale effectively, and remain reliable. I hold <a id='arch' href='https://learn.microsoft.com/api/credentials/share/en-gb/YektaDemirci-4544/5B7B55090DEE8D0A?sharingId=6B12AEB009A2053A'><b> Microsoft: Azure Solutions Architect Expert</b></a> certification.

This is where everything comes together and the magic happens! In my professional journey, I leveraged my experience with <b>Python</b> with <b>Django</b>, complemented by nonprofessional exposure to <b>Java</b>. I'm also at ease working with <b>C++</b> for time-sensitive services.

Regardless how powerful the magic is; having a user-friendly interface is crucial for any application. Although I've mostly dealt with backend systems, I also get the frontend side. I've got hands-on experience using <b>JavaScript</b> with <b>TypeScript</b> and <b>React</b>.

All the previous skills matter in the end, but only if the product satisfies what the customers need. That's why accurately understanding and meeting the needs while offering effective solutions is crucial to me. I hold <a id='pspo' href='https://www.scrum.org/user/1281186'><b>PSPO-I and PSM-I</b></a> certifications from Scrum. Additionally, I have completed <a id='pmcert' href='https://www.coursera.org/account/accomplishments/specialization/certificate/WURKQZE3CUT9'><b>Software Product Management</b></a> specialization.
PROJECTS *complexity*
Hololens2 XR Fundamentals*
EMBRACE EXTENDED REALITY!
An app with hand interaction, object tracking, 3D object interaction, eye-tracking and spatial anchors
An app with hand interaction, object tracking, 3D object interaction, eye-tracking and spatial anchors
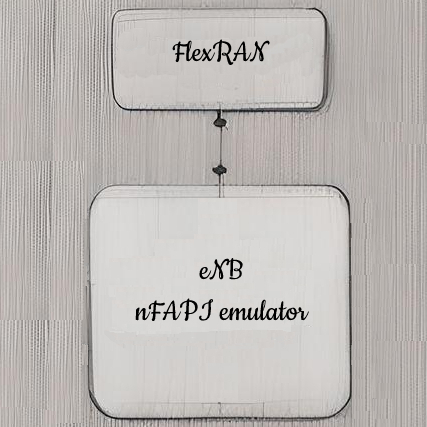
Spectrum Sharing in 5G***
NEW RADIO: 5G
An algorithm to share spectrum resources for 5G Radio Access Networks in an efficient and fair way
An algorithm to share spectrum resources for 5G Radio Access Networks in an efficient and fair way

Food Hunter Web App**
WHAT ARE WE CRAVING?
A web application utilizing Google Maps, Web Crawling and more, practised agile methods
A web application utilizing Google Maps, Web Crawling and more, practised agile methods
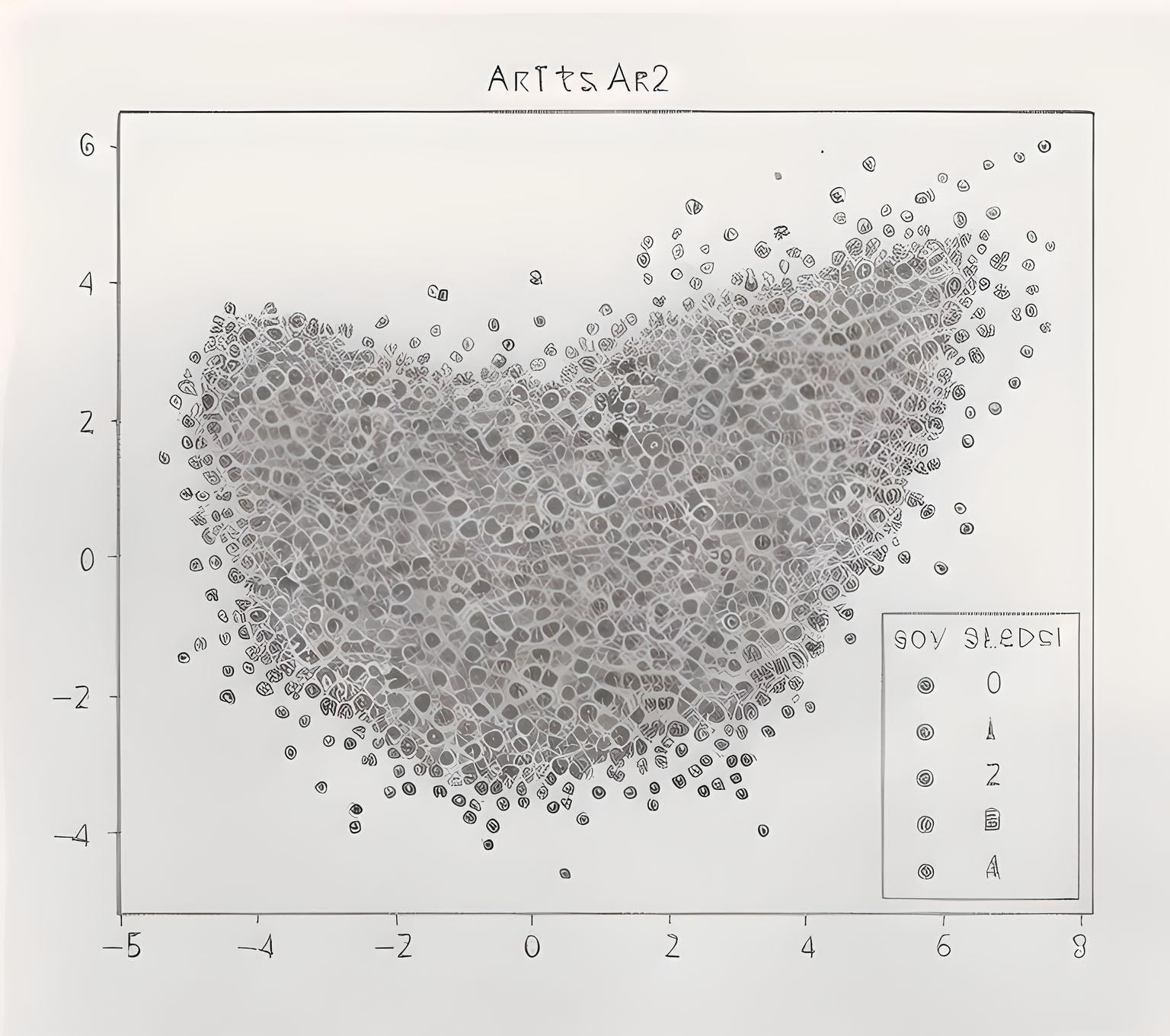
Feature Extraction and CNN*
AI IN FASHION
Feature extraction via PCA, LDA, Isomap, LLE, t-SNE and training ML, CNN models
Feature extraction via PCA, LDA, Isomap, LLE, t-SNE and training ML, CNN models
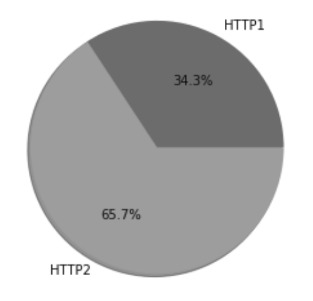
HTTP2 flow classification**
GUESS THE FLOW PROTOCOL
Dateset creation from a web traffic colection and HTTP flow prediction with +90% accuracy.
Dateset creation from a web traffic colection and HTTP flow prediction with +90% accuracy.
Vertex Cover with Multithread*
MULTITHREADING
Polynomial time reduction with approximations to solve a Vertex Cover problem with multithreading in C++
Polynomial time reduction with approximations to solve a Vertex Cover problem with multithreading in C++

Edge Detection with CUDA**
PARALLEL PROGRAMMING
Real time edge detection using CUDA and GPU
Real time edge detection using CUDA and GPU
2D SLAM Robot***
A MILESTONE PROJECT
An autonomous 2D Simultaneous Localization and Mapping (SLAM) robot
An autonomous 2D Simultaneous Localization and Mapping (SLAM) robot
FFT in Real Time*
DIGITAL SIGNAL PROCESSING
FFT and overlap-save algorithms in C using Linux based Real-Time OS
FFT and overlap-save algorithms in C using Linux based Real-Time OS
Peptide Prediction**
TO ORGANIC ELECTRONICS
An app to predict new metal binding peptides
An app to predict new metal binding peptides
TESTIMONIALS

I have known Yekta for more than five years, beginning during his time at the University of Washington. With a keen eye for detail, Yekta demonstrates a remarkable ability to ask insightful questions, revealing a profound understanding of the intricacies of software development.
.....
Mehmet Tatlicioglu, MASc
Senior Engineer at Amazon
Yekta collaborated directly with me during his summer research internship in 2018-2019. He possesses an innate understanding of the tasks at hand, requiring little guidance, yet he knows precisely when to seek assistance or clarification, leaving me with complete confidence in the final product.
.....
Siddharth Rath, PhD
Researcher at U.Washington
I had the pleasure of working closely with Yekta at Interaptix Augmented Reality. I was the Head of Product, and Yekta was an exceptional full-stack software developer. His contributions to the software development team significantly enhanced the success and stability of our product. Yekta possesses unwavering commitment to a customer and market-focused mindset.
.....
Lisa Black, MBA
Head of Product
At Interaptix, Yekta proved himself to be a formidable force in backend development. He was instrumental in the creation of numerous innovative features and made significant enhancements to several APIs, demonstrating a keen eye for optimization and scalability. His dedication and skill turned complex projects into well-structured, efficient systems.
.....
Daehyun Lee, MBA
CTO at Interaptix
Yekta created new functionality in our REST API and helped us transition critical endpoints to our new GraphQL API. Yekta made improvements to our data processing pipelines heavily utilizing Python, Django, Celery, and working with Azure Cloud resources. The results of Yekta's efforts were seen by our customers directly and the changes he made have brought lasting value to our product.
.....
Luke Elliott
Lead Engineer at Interaptix
I have known Yekta for more than five years, beginning during his time at the University of Washington. With a keen eye for detail, Yekta demonstrates a remarkable ability to ask insightful questions, revealing a profound understanding of the intricacies of software development.
.....Mehmet Tatlicioglu, MASc
Senior Engineer at Amazon
Yekta collaborated directly with me during his summer research internship in 2018-2019. He possesses an innate understanding of the tasks at hand, requiring little guidance, yet he knows precisely when to seek assistance or clarification, leaving me with complete confidence in the final product.
.....Siddharth Rath, PhD
Researcher at U.Washington